Cancellation
When a client is no longer interested in the result of an RPC call, client can cancel the request to inform the server. The server should stop any ongoing processing.
Server-Side (Rust)
In this example, c.spawn_and_abort_on_reset(<task>) spawn a tokio task that
will be automatically aborted if the connection is lost or the client sends a
reset frame.
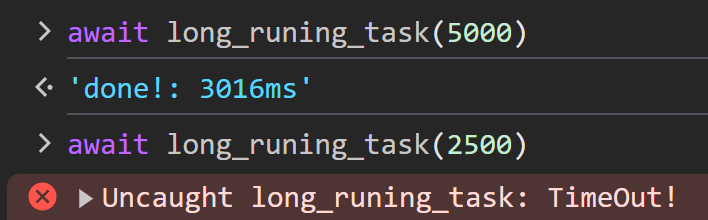
"long_runing_task" procedure take 3s to finished, Client can request to cancle
the process by sending a reset frame at any time.
use axum_socket_io::{Procedure, SocketIo};
use std::{net::SocketAddr, time::Duration};
use tokio::time::sleep;
pub async fn handle_socket(mut socket: SocketIo, addr: SocketAddr) {
println!("A user connected: {addr:#?}");
while let Ok(ev) = socket.recv().await {
match ev {
/* ... */
Procedure::Notify(req) => match req.method() {
"ping" => socket.notify("pong", req.data()).await.unwrap(),
_ => {}
},
Procedure::Call(req, res, c) => match req.method() {
"myip" => res.send(addr.to_string()).await.unwrap(),
"uppercase" => {
let msg = std::str::from_utf8(req.data()).unwrap();
res.send(msg.to_uppercase()).await.unwrap()
}
"long_runing_task" => {
c.spawn_and_abort_on_reset(async {
sleep(Duration::from_secs(3)).await;
res.send("done!").await.unwrap();
});
}
_ => {}
},
}
}
println!("user disconnected: {addr:#?}");
}Note that cancellation only applies to asynchronous tasks (Future) at the
.await point.
Warning
It is the responsibility of the developer to implement an appropriate undo mechanism if needed. Ensure that your code handles cancellation gracefully to avoid unintended side effects.
Client-Side (JavaScript)
AbortController is used to signal cancellation for an rpc request, similar to
the fetch() API.
<script type="module">
import { SocketIo } from "https://esm.sh/client-socket-io@0.1.0";
const decodeText = (data) => new TextDecoder().decode(data);
window.socket = new SocketIo("ws://127.0.0.1:3000/socket");
await socket.connect();
window.rpc = async (...args) => decodeText(await socket.call(...args));
window.long_runing_task = async timeout => {
const c = new AbortController();
setTimeout(() => c.abort("TimeOut!"), timeout);
const start = performance.now();
const output = await rpc("long_runing_task", [], { signal: c.signal });
const end = performance.now();
return `${output}: ${Math.round(end - start)}ms`;
};
async function onPong() {
for await (const msg of socket.on("pong")) {
console.log("[Pong]", decodeText(msg));
}
}
[onPong].forEach((fn) => fn().catch(console.error));
</script>